
车门玻璃升降系统-防夹原理
本文主要讲解了车窗升降系统的防夹算法实现原理。首先,通过车窗升降系统受力分析,可以得出玻璃运动速度与阻力成正比的关系。然后介绍了车窗升降系统的基本参数,包括固有参数和运动参数。接着,阐述了防夹算法实现的关键要素,包括车窗位置的精确判断和夹物力的判断。防夹触发条件包括电动车窗处于自动上升过程中、电动车窗处于防夹区域中以及电动车窗遇到的阻力超过防夹力。车窗控制流程和防夹区域判断方法也在文中进行了介绍。最后,讲解了防夹力判断方法和误反弹现象的原因。总的来说,本文详细介绍了车窗升降系统的防夹算法实现原理,为读者提供了相关的理论知识。
今天我将通过介绍车窗升降系统基本参数、防夹算法实现关键要素来讲解防夹算法实现原理。
- 车窗升降系统受力分析,见图片1。
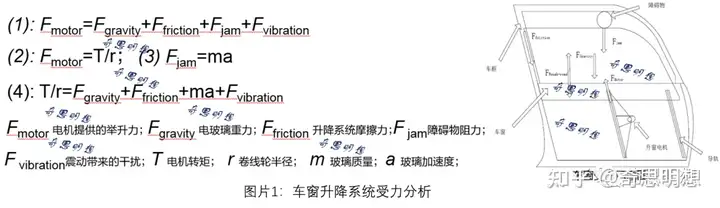
升降系统平稳运行过程中,玻璃重力、系统摩擦阻力和震动干扰保持不变,玻璃匀速运动,当玻璃遇到障碍物,玻璃减速运动,玻璃受到的阻力与玻璃加速度成正比。通过对玻璃运动速度的变化的监控可以得到玻璃受到的阻力。当车辆行驶在坑洼路面时,玻璃升降过程中会受到振动干扰,导致玻璃速度变化,也会引起自动关闭玻璃时出现不升反降。
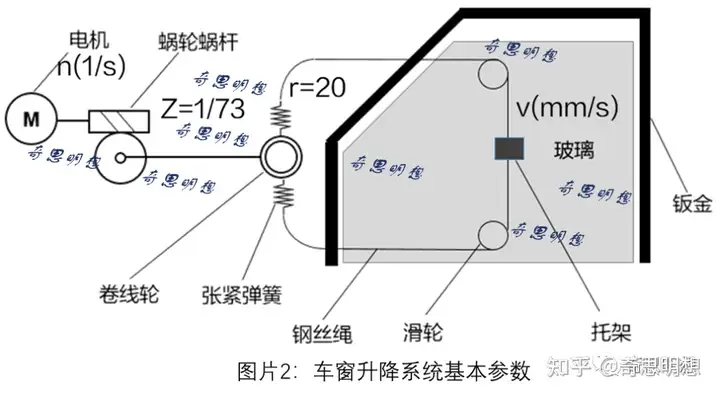
2. 车窗升降系统基本参数,见图片2。
2.1 固有参数:
n(1/s):电机转速; 蜗轮蜗杆传动比(Z):1/73;卷线轮半径r:20mm;玻璃速度v(mm/s)。
2.2 运动参数:
v=n×Z×2π×r
对于确定的升降系统,涡轮蜗杆传动比和卷线轮直径是固定的,玻璃速度变化与电机转速变化一致,通过对电机转速变化的监控能够得到玻璃速度的变化。
脉冲当量:
脉冲当量:即是每一个霍尔脉冲或纹波脉冲对应的车窗玻璃的位移量。电机涡轮传动比为Z,电机每转动一圈对应的霍尔脉冲个数为K, Lp是系统的脉冲当量
Lp="Z×2π×r " /K
K为电机转动一圈对应的脉冲数,霍尔电机K=4;文波电机K=10
霍尔电机:Lp=0.43mm、文波电机:Lp=0.17mm
3. 防夹算法实现关键要素
3.1 车窗位置的精确判断
3.2 夹物力的判断
4. 防夹触发条件
4.1 电动车窗处于自动上升过程中
4.2 电动车窗处于防夹区域中
4.3 电动车窗遇到的阻力超过防夹力(100N)
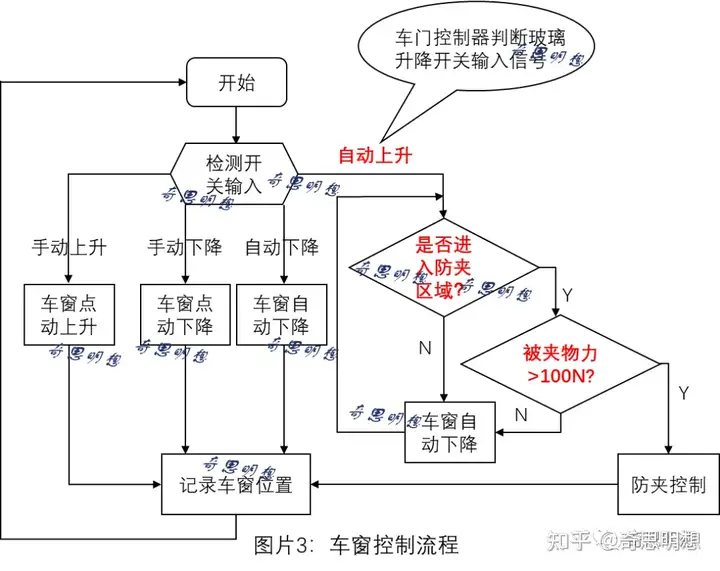
5. 车窗控制流程,见图片3。
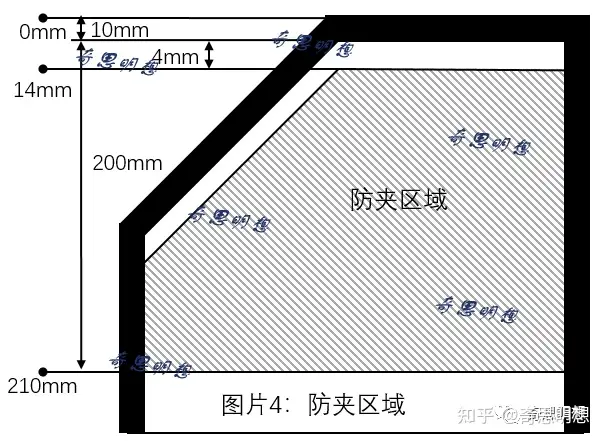
6. 防夹区域判断方法,见图片4。
车门控制器设定玻璃完全关闭时为起始位置,为了保证密封性玻璃入槽量设为10mm,则玻璃防夹区域为14mm<L<210mm
L=N×Lp(L:玻璃行程;N:脉冲数;Lp:脉冲当量)
以K=10文波电机为例,脉冲当量Lp:=0.17mm;防夹区域对应的脉冲数:82<N<1236
7. 防夹力判断方法
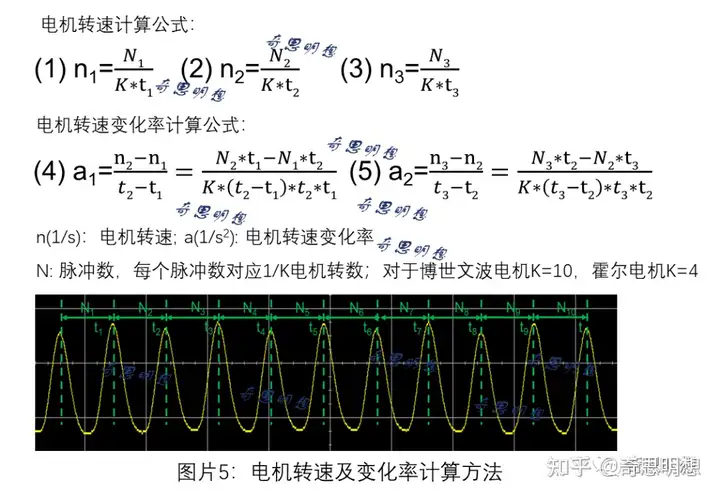
7.1 电机转速及变化率计算方法,图片5。
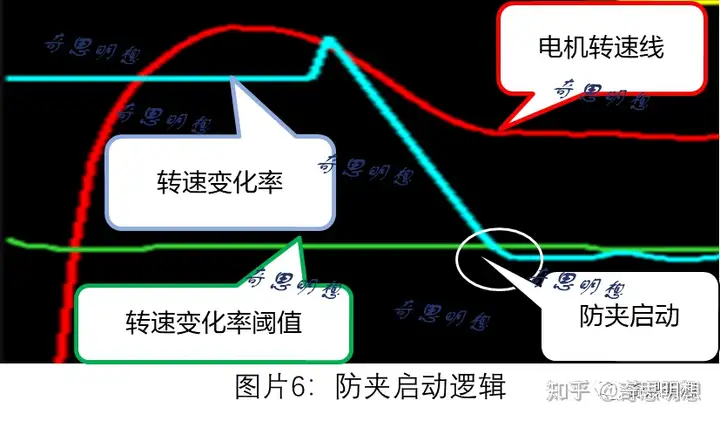
7.2 防夹启动逻辑,见图片6。
当电机转速变化率超过根据防夹标定测量结果设定的转速变化率阈值时,防夹启动电机启动翻转,玻璃自动下降。
车门升降系统中任何一个零件如果其与车门防夹标定时的质量状态不一致或发生较大变化都将导致防夹功能误判,出现误反弹。所以一个稳定的车门系统对防夹功能的实现至关重要。而车辆行驶在坑洼路面时玻璃出现误反弹问题,即一键升降玻璃时玻璃不升反降,这是由于系统受到异常冲击载荷。所以误反弹属于正常现象。
奇思明想