
ADAS功能定义-车道偏离预警/车道保持辅助(LDW/LKA)
车道保持辅助系统(LKA)和车道偏离预警(LDW)是两种常用的车辆安全辅助系统。LKA通过感知车辆前方车道线并控制转向系统,实现车道偏离抑制功能,提高行车舒适性和安全性。LDW利用摄像头等传感器获取车道线信息,并在车辆即将偏离车道时通过显示和方向盘震动提醒驾驶员控制车辆,提高行车安全性。LKA和LDW的应用场景包括直道行驶、弯道行驶以及单侧车道线情况。LKA和LDW的功能逻辑是通过声音报警和方向盘震动提醒驾驶员,同时在特定条件下进行车道纠正。
LKA 功能概述
车道保持辅助系统(LKA)主要是指利用摄像头等传感器获取车辆前方车道线,并基于感知得到的自车处于车道中的位置;然后通过控制转向系统EPS,实现车道偏离抑制功能。车道保持辅助系统在一定车速范围内辅助驾驶员对方向盘的操纵控制,可以在一定程度上减轻了驾驶员的驾驶负担,提高了行车舒适性,同时LKA可以避免无意识的车道偏离,提高了行车安全性。
LDW功能概述
车道偏离预警(LDW)主要是指利用摄像头等传感器获取车辆前方车道线,并基于感知得到的自车处于车道中的位置;当车辆即将偏离车道时,系统能通过显示和方向盘震动提醒驾驶员及时控制车辆,在一定车速范围内提高了行车安全性。
LKA功能/性能相关指标
| 项目 | 指标值 |
| 工作车速范围 | 60 km/h ~150 km/h |
| 弯道半径 | >125m |
| 直道时偏离车道距离 | <20cm |
| 弯道时偏离车道距离 | <30cm |
| 引发的侧向加速度 | ≤3m/s² |
| 引发的侧向冲击度 | ≤5m/s3 |
| 干预力矩(折算到方向盘手力) | ≤3Nm |
| 可用性 | 大于95% |
| 漏触发率 | 小于1/2000km |
| 误触发率 | 低于1/1000km(总体而言) |
| 误触发率 | 低于1/500 km(建筑区域) |
LDW应用场景
1.直道时车道偏离预警
自车行驶在直道上,有向左或向右冲出本车道的趋势,系统对驾驶员进行预警提示。
图 自车位于直道时示意图
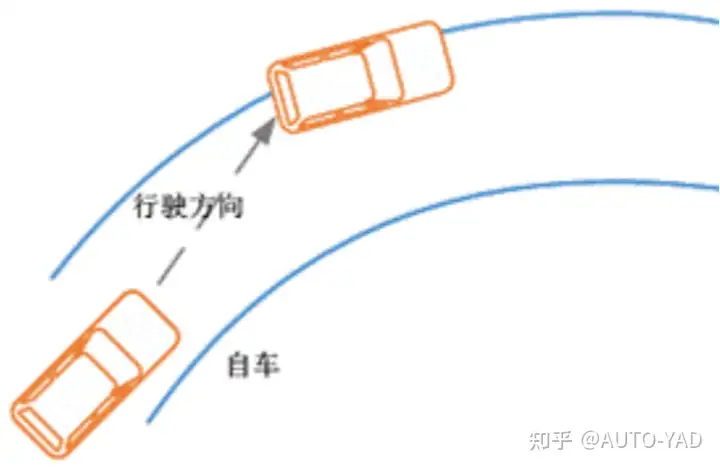
2.弯道时车道偏离预警
车辆行驶在弯道上,向外弯或向最内侧的内弯有冲出本车道的趋势,系统对驾驶员进行预警提示。但向内弯(非最内侧)车道有冲出本车道的趋势,系统不进行预警。
3.只有单侧车道线
自车行驶在道路两边只有一侧有车道线,则偏离有车道线的一侧需要预警,另一侧不做预警。
LKA应用场景
1. 直道行驶车道保持
当车辆在直线道路上行驶时,如果检测到车辆有偏离当前车道的趋势(如向左或向右漂移),LKA系统将通过电子转向系统(EPS)主动施加适当的转向力矩,帮助车辆保持在原本的车道内。
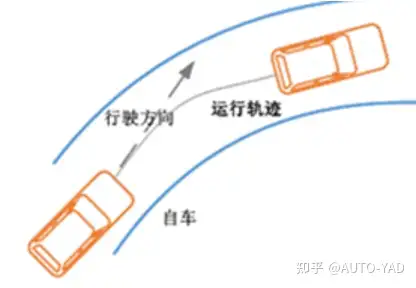
2. 弯道行驶车道保持
当车辆在弯道上行驶时,如果检测到车辆向外侧弯道或向内侧弯道的最内轮廓有偏离当前车道的趋势,LKA系统将通过EPS主动施加适当的转向力矩,帮助车辆保持在原本的车道内。但如果偏离趋势是向内侧非最内轮廓的弯道,LKA系统不会进行转向辅助。
3. 单边车道线场景
当车辆行驶在只有单侧车道线(左侧或右侧)的道路上时,如果车辆偏离有车道线一侧,LKA系统会通过EPS施加转向力矩进行纠正;而无车道线一侧,则不进行转向辅助。
LDW功能逻辑
前轮左侧/右侧即将越过报警临界线时,同时进行声音报警、仪表图文提醒、方向盘震动提醒
LKA功能逻辑
前轮左侧/右侧即将越过报警线(TTLC小于0.8s(TBD)后触发纠偏),同时进行声音报警
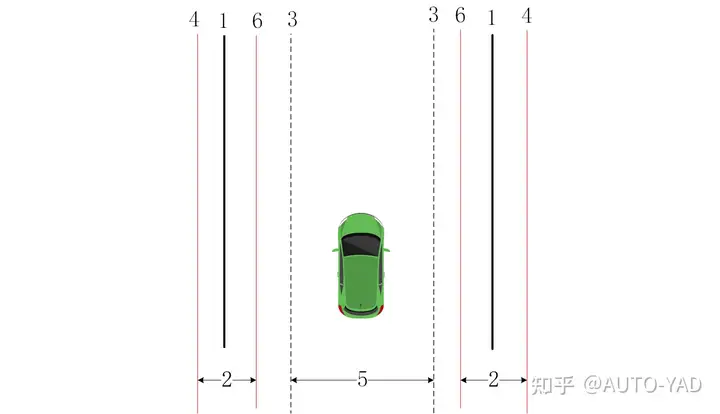
注:1.车道线、2.报警临界线设置区域、3.最早报警线、4.最迟报警线 、5.非报警区域、6.报警临界线
报警线术语
1.车道线:由可见车道标识确定,在无可见车道标识的情况下由其他提示性的可见道路特征或者由其他方式如GPS、磁道等确定的车道边界线。
2.报警临界线设置区域;最早报警线与最迟报警线之间的区域,报警临界线设置与该区域内
3.最早报警线:报警临界线变化范围内的最内侧界限;
4.最迟报警线 报警临界线变化范围的最外侧界线;
5.非报警区域:两条最早报警线之间的区域;
6.报警临界线:发出报警时车辆在道路上的位置,对应于系统内部设置的报警触发点
注1: 在给定的TTLC的情况下,此报警临界线将根据偏离速度的不同而变化
注2:报警临界线应位于报警临界线设置区域内;
7.TTLC(Time To Line Crossing)越界时间:计算得到的发生车道偏离所需要的时间。
注:越界时间(TTLC):TTLC=D/v,D为车辆特定部位与车道边界之间的横向距离,v为车辆偏离速度(速度的横向分量)

AUTO-YAD