
再议标准续航和动态续航
随着新能源汽车的普及,续航虚的问题逐渐凸显。为了改善这一问题,OEM开始寻找对策,其中动态续航功能被认为是当前较好的回应。标准续航显示公告续航里程值,但未考虑驾驶行为的差异,存在续航虚的问题。而动态续航通过实时探测用户的驾驶行为和平均能耗水平,基于电池的实际可用能量来预测真实可行驶里程。然而,前方道路的路况和特征等因素仍然无法进行精准预估。智能续航则进一步考虑了目的地的道路特征和路况,综合动态续航进行完美的显示,实现了人-车-路协同的融合。
随着新能源汽车普及,“续航虚”的抱怨逐渐凸显,为改善此问题,OEM纷纷寻思对策,动态续航功能,可看作是当前较好的回应。
之前,当下,及未来,推测,“续航显示”发展的“三部曲”如下:

【标准续航】
满电(soc=100%),续航显示公告续航里程值;没电(soc=0%),续航显示为零;一半的电量(soc=50%),续航显示1/2(公告续航里程值)
里程值和SOC的函数关系简单,y=f(x),线性一维。如下图示
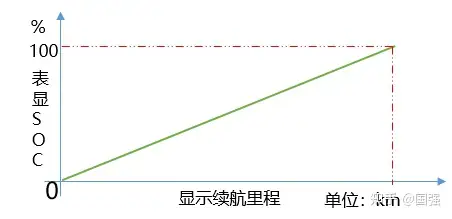
最大的缺陷:续航虚;未考虑‘千人千面’驾驶行为的差异;
【动态续航】
动态的定义是,系统实时探测用户的驾驶行为,平均能耗水平和大小,基于电池的实际可用的能量来比较真实的预测,在对用户驾驶行为的把握下,能够继续行驶的里程。
# 关键词一 平均能耗
通常系统会统计,用户在过去30或50公里内,用户的平均能耗;单位kwh/km,统计采用迭代的方法来实现。示意如下:

# 关键词---动力电池可用的能量
电池可用的能量==电池可用的电池的度数,单位是kwh,和生活中用电的度数是一个概念。
仪表上看到的电池的电量(soc)==用来衡量电池充满的程度,无单位。
# 关键词---估算动态续航
S(动态续航)=电池可用的能量/(p平均能耗),再基于其他的限值因素等即可。
仍然存在的不足:前方道路的路况及道路特征等要素是未知的,无法进行进一步的精准预判和预估……
【智能续航】
智能续航,不仅需要考虑用户的驾驶行为,且要考虑去往目的地的道路特征和路况,要将车辆当前位置距离目的地的道路所需消耗的能量进行合理性的预估和计算,来综合动态续航进行完美的显示。
智能续航,做到了人-车-路协同的融合,敬请期待分享……

国强